目录
https://wiki.ros.org/cn/ROS/Tutorials/WritingPublisherSubscriber%28c%2B%2B%29
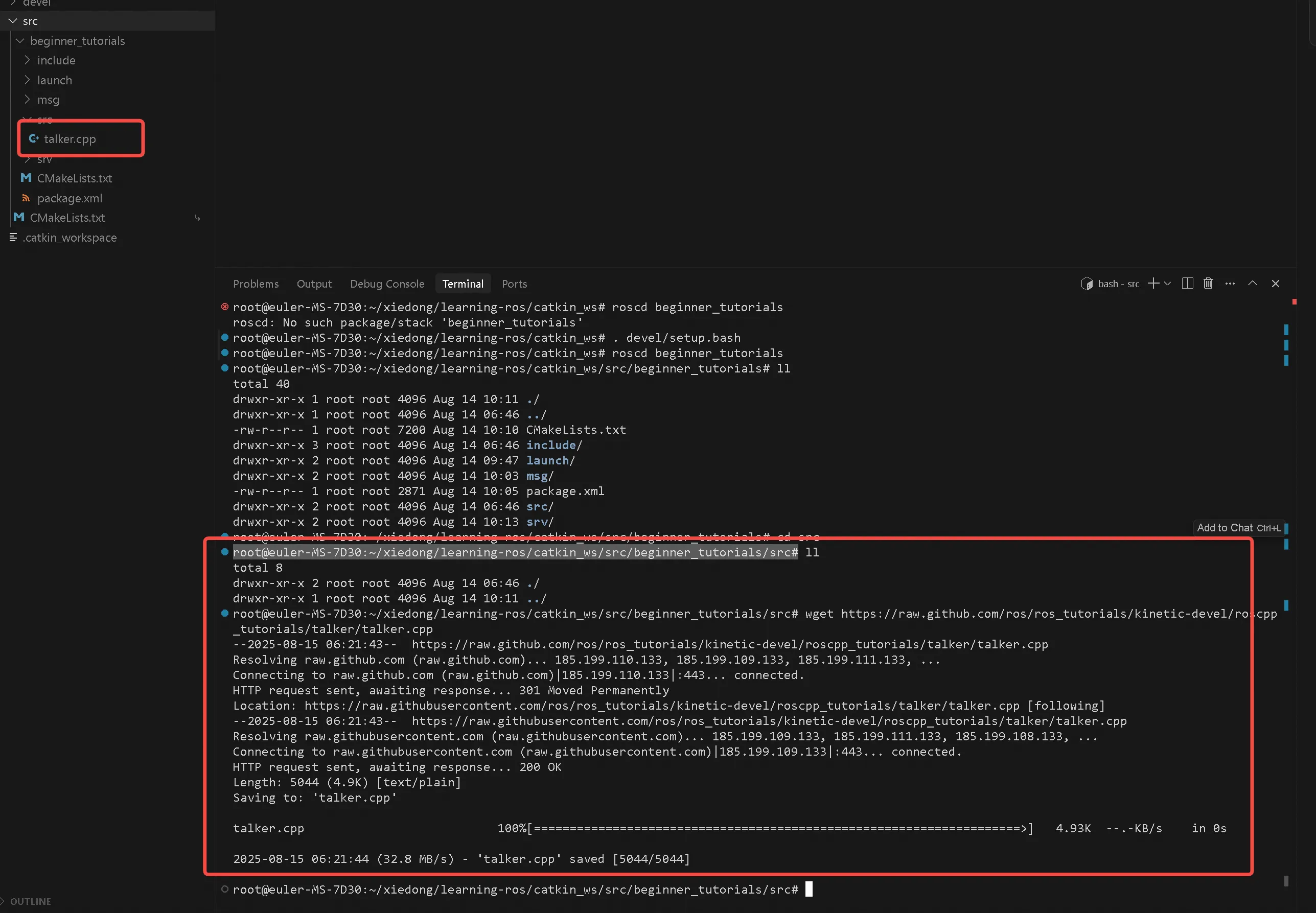
bash展开代码root@euler-MS-7D30:~/xiedong/learning-ros/catkin_ws# roscd beginner_tutorials
roscd: No such package/stack 'beginner_tutorials'
root@euler-MS-7D30:~/xiedong/learning-ros/catkin_ws# . devel/setup.bash
root@euler-MS-7D30:~/xiedong/learning-ros/catkin_ws# roscd beginner_tutorials
root@euler-MS-7D30:~/xiedong/learning-ros/catkin_ws/src/beginner_tutorials#
root@euler-MS-7D30:~/xiedong/learning-ros/catkin_ws/src/beginner_tutorials/src# wget https://raw.github.com/ros/ros_tutorials/kinetic-devel/roscpp_tutorials/talker/talker.cpp
这个程序的主要功能是:
- 初始化一个名为"talker"的ROS节点
- 创建一个发布者,向"chatter"话题发布字符串消息
- 以10Hz的频率不断发布包含"hello world"和计数的消息
- 同时将发布的消息内容打印到控制台
bash展开代码wget https://raw.github.com/ros/ros_tutorials/kinetic-devel/roscpp_tutorials/listener/listener.cpp
这个程序的主要功能是:
- 初始化一个名为"listener"的ROS节点
- 创建一个订阅者,订阅"chatter"话题
- 每当收到新消息时,调用
chatterCallback函数处理 - 在回调函数中打印接收到的消息内容
与之前的"talker"程序配合使用时:
- "talker"发布消息到"chatter"话题
- "listener"订阅该话题并接收消息
- 这样就实现了两个ROS节点之间的单向通信
这种发布-订阅模式是ROS中最基本也是最重要的通信机制之一,广泛应用于机器人系统中不同模块间的数据交换。在实际应用中,消息类型通常会替换为更复杂的自定义消息类型,以传输各种传感器数据、控制指令等。
ros::Rate loop_rate(10);
这句话是 C++ 的“类实例化”语法,也叫“构造对象”语法。 等价于: ros::Rate loop_rate = ros::Rate(10);
ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback);
这句话的作用是让 ROS 节点订阅名为 "chatter" 的话题,并在收到消息时调用 chatterCallback 回调函数。详细解释如下:
ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback);
- n 是 ros::NodeHandle 的实例,负责与 ROS 系统通信。
- subscribe 是 NodeHandle 的成员函数,用于订阅某个话题(topic)。
- "chatter" 是你要订阅的话题名称。
- 1000 是消息队列的长度(缓冲区大小),如果消息来得太快,最多缓存 1000 条,超过就丢弃最旧的。
- chatterCallback 是收到消息时自动调用的回调函数,参数类型要和话题消息类型一致。
这句代码的意思是:“订阅 chatter 话题,每当有新消息到来时,就调用 chatterCallback 处理消息,并且最多缓存 1000 条未处理的消息。”
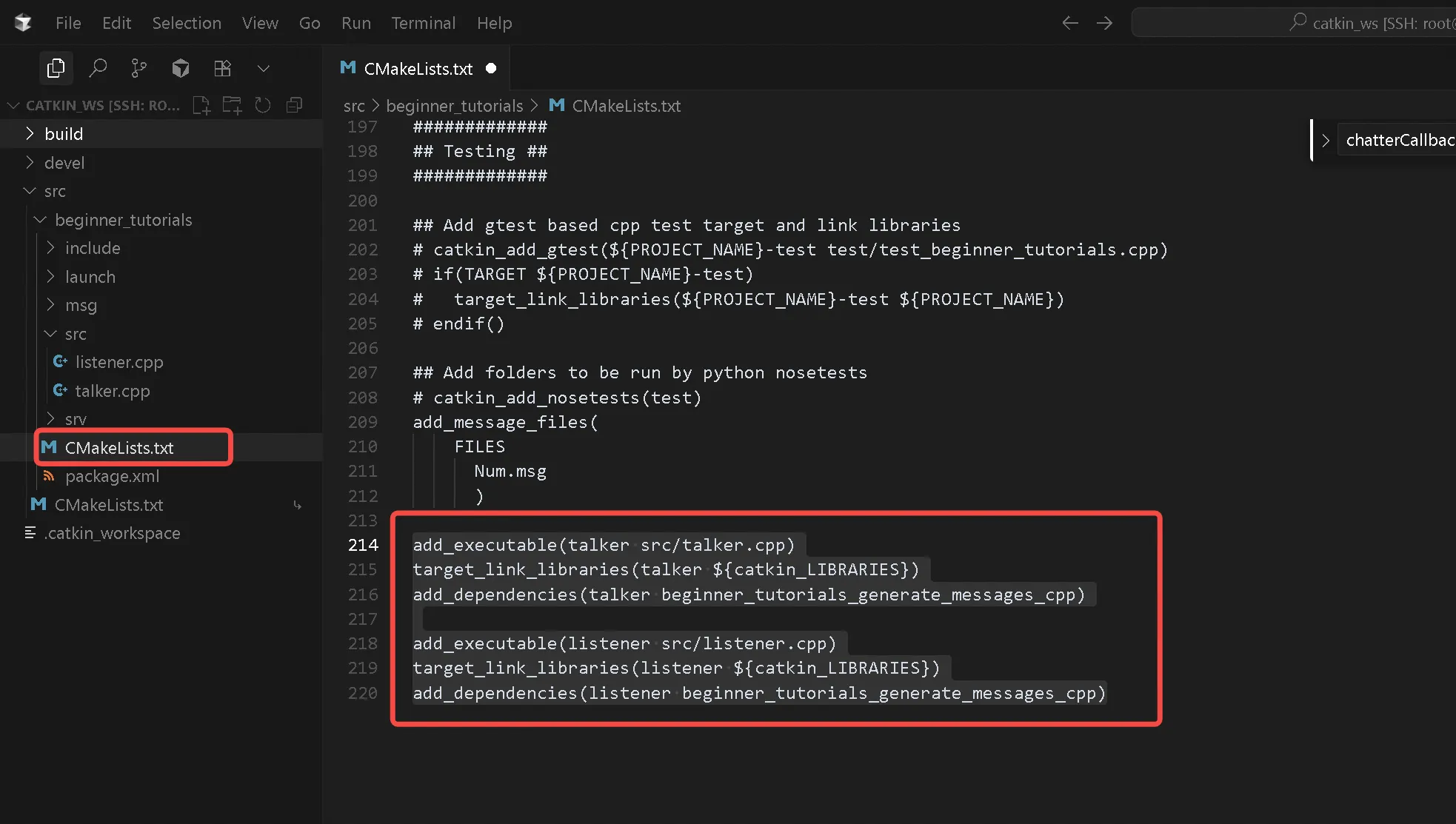
这几句加进去:
bash展开代码add_executable(talker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})
add_dependencies(talker beginner_tutorials_generate_messages_cpp)
add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})
add_dependencies(listener beginner_tutorials_generate_messages_cpp)
这几行代码是 ROS/Catkin 项目中的 CMake 构建指令,用于编译和链接 ROS 节点(可执行文件)。以下是逐行解析其核心功能:
1. add_executable(talker src/talker.cpp)
- 功能:将
src/talker.cpp编译成一个名为talker的可执行文件(ROS 节点)。 - 作用:
- 定义了一个 ROS 发布者(Publisher)节点,对应之前的
talker.cpp代码。 - 编译后会生成
talker二进制文件(通常在devel/lib/<package_name>/目录下)。
- 定义了一个 ROS 发布者(Publisher)节点,对应之前的
2. target_link_libraries(talker ${catkin_LIBRARIES})
- 功能:将
talker可执行文件链接到 ROS 的核心库(catkin_LIBRARIES)。 - 作用:
- 确保
talker能调用 ROS 的 API(如ros::init(),ros::Publisher等)。 ${catkin_LIBRARIES}是 Catkin 工具链提供的预定义变量,包含所有必要的 ROS 依赖库(如roscpp、std_msgs等)。
- 确保
3. add_dependencies(talker beginner_tutorials_generate_messages_cpp)
- 功能:显式声明
talker依赖于beginner_tutorials_generate_messages_cpp。 - 作用:
- 确保在编译
talker之前,先编译生成该包(beginner_tutorials)的自定义消息(如果有)。 - 如果包内定义了自定义消息(如
.msg文件),ROS 需要先将其转换为 C++ 代码(通过message_generation),然后才能被talker使用。
- 确保在编译
4. add_executable(listener src/listener.cpp)
- 功能:将
src/listener.cpp编译成名为listener的可执行文件(ROS 节点)。 - 作用:
- 定义了一个 ROS 订阅者(Subscriber)节点,对应之前的
listener.cpp代码。 - 编译后会生成
listener二进制文件。
- 定义了一个 ROS 订阅者(Subscriber)节点,对应之前的
5. target_link_libraries(listener ${catkin_LIBRARIES})
- 功能:将
listener链接到 ROS 核心库(catkin_LIBRARIES)。 - 作用:
- 确保
listener能使用 ROS 的订阅功能(如ros::Subscriber、回调函数等)。
- 确保
6. add_dependencies(listener beginner_tutorials_generate_messages_cpp)
- 功能:声明
listener依赖于beginner_tutorials_generate_messages_cpp。 - 作用:
- 与
talker类似,确保自定义消息(如果有)先被生成,再编译listener。
- 与
总结
| 指令 | 功能 |
|---|---|
add_executable | 将源代码编译为可执行文件(ROS 节点) |
target_link_libraries | 链接 ROS 核心库,使节点能调用 ROS API |
add_dependencies | 确保自定义消息先于节点编译,避免未定义符号错误 |
关键点
- ROS 节点的构建流程:
- 先编译消息(如果有)→ 再编译节点 → 最后链接依赖库。
catkin_LIBRARIES:- 是 ROS 项目的“万能”依赖项,包含
roscpp、std_msgs等基础库。
- 是 ROS 项目的“万能”依赖项,包含
- 依赖关系的重要性:
- 如果包内有自定义消息(如
MyMessage.msg),必须通过add_dependencies确保消息生成先完成,否则编译会失败。
- 如果包内有自定义消息(如
类比理解
add_executable≈ 告诉编译器:“把这份代码变成可执行程序”。target_link_libraries≈ 告诉链接器:“这个程序需要 ROS 的库才能运行”。add_dependencies≈ 告诉构建系统:“先搞定消息生成,再编译这个程序”。
cmake错误,CMakeLists.txt改为这样:
bash展开代码cmake_minimum_required(VERSION 2.8.3)
project(beginner_tutorials)
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
add_message_files(
FILES
Num.msg
)
add_service_files(
FILES
AddTwoInts.srv
)
generate_messages(
DEPENDENCIES
std_msgs
)
catkin_package(
CATKIN_DEPENDS message_runtime roscpp rospy std_msgs
)
include_directories(
include
${catkin_INCLUDE_DIRS}
)
add_executable(talker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})
add_dependencies(talker ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})
add_dependencies(listener ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
CMakeLists.txt 里的 ROS 相关指令:
1. find_package
作用:查找并加载 catkin 以及你需要用到的 ROS 包(如 roscpp、rospy、std_msgs、message_generation 等),让后续的 CMake 指令能用到这些包的功能和头文件。
示例:
cmake展开代码find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs message_generation )
通俗理解:告诉 CMake,“我要用到这些包,请帮我找好它们。”
2. add_message_files
作用:声明本包要用到的自定义消息(.msg 文件),让 catkin 知道需要为这些消息生成代码。
示例:
cmake展开代码add_message_files( FILES Num.msg )
通俗理解:告诉 CMake,“我要用这些自定义消息,请帮我生成相关代码。”
3. add_service_files
作用:声明本包要用到的自定义服务(.srv 文件),让 catkin 知道需要为这些服务生成代码。
示例:
cmake展开代码add_service_files( FILES AddTwoInts.srv )
通俗理解:告诉 CMake,“我要用这些自定义服务,请帮我生成相关代码。”
4. generate_messages
作用:根据上面声明的消息和服务,自动生成 C++/Python 等语言的消息/服务代码。
DEPENDENCIES 里写上你消息/服务里用到的其他消息包(比如 std_msgs)。
示例:
cmake展开代码generate_messages( DEPENDENCIES std_msgs )
通俗理解:告诉 CMake,“现在请为我声明的消息和服务生成代码。”
5. catkin_package
作用:声明本包对外提供哪些功能、依赖哪些包。这样其他包在依赖你时能自动找到你的头文件、库、消息等。
示例:
cmake展开代码catkin_package( CATKIN_DEPENDS message_runtime roscpp rospy std_msgs )
通俗理解:告诉 CMake,“我的包对外提供哪些功能,依赖哪些包。”
6. include_directories
作用:指定头文件搜索路径。一般要包含本包的 include 目录和 catkin 自动生成的头文件路径。
示例:
cmake展开代码include_directories( include ${catkin_INCLUDE_DIRS} )
通俗理解:告诉 CMake,“编译时请到这些目录找头文件。”
7. add_executable / target_link_libraries / add_dependencies
作用:
- add_executable:声明要编译的可执行文件(比如 talker、listener)。
- target_link_libraries:指定可执行文件要链接哪些库(比如 ${catkin_LIBRARIES})。
- add_dependencies:指定可执行文件依赖哪些生成目标(比如消息/服务生成),确保先生成消息/服务代码再编译你的程序。
示例:
cmake展开代码add_executable(talker src/talker.cpp) target_link_libraries(talker ${catkin_LIBRARIES}) add_dependencies(talker ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
通俗理解:
- add_executable:我要生成一个叫 talker 的程序,源码在 src/talker.cpp。
- target_link_libraries:编译时要链接 ROS 的库。
- add_dependencies:先生成消息/服务代码,再编译我的程序,避免找不到头文件。
在ws目录执行catkin_make
bash展开代码Scanning dependencies of target beginner_tutorials_generate_messages Scanning dependencies of target talker Scanning dependencies of target listener [ 76%] Built target beginner_tutorials_generate_messages [ 82%] Building CXX object beginner_tutorials/CMakeFiles/listener.dir/src/listener.cpp.o [ 88%] Building CXX object beginner_tutorials/CMakeFiles/talker.dir/src/talker.cpp.o [ 94%] Linking CXX executable /root/xiedong/learning-ros/catkin_ws/devel/lib/beginner_tutorials/talker [ 94%] Built target talker [100%] Linking CXX executable /root/xiedong/learning-ros/catkin_ws/devel/lib/beginner_tutorials/listener [100%] Built target listener
可见有可执行文件:
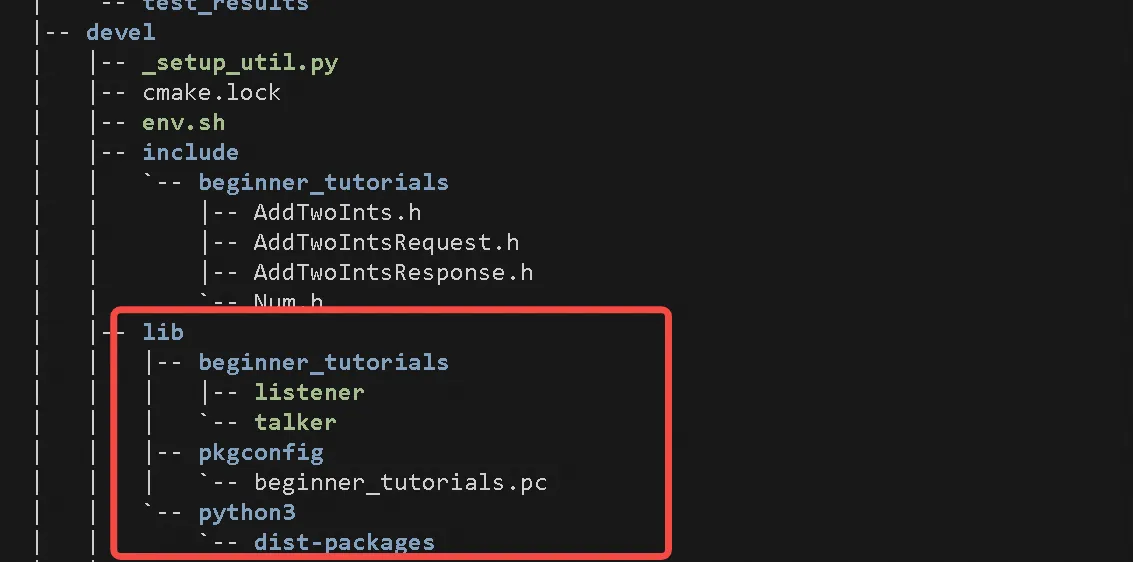
catkin_make 后,所有 add_executable 生成的目标(如 talker、listener)都在 devel/lib/包名/ 目录下。 你可以用 rosrun 包名 可执行文件名 或直接用绝对路径运行。
bash展开代码rosrun beginner_tutorials talker rosrun beginner_tutorials listener
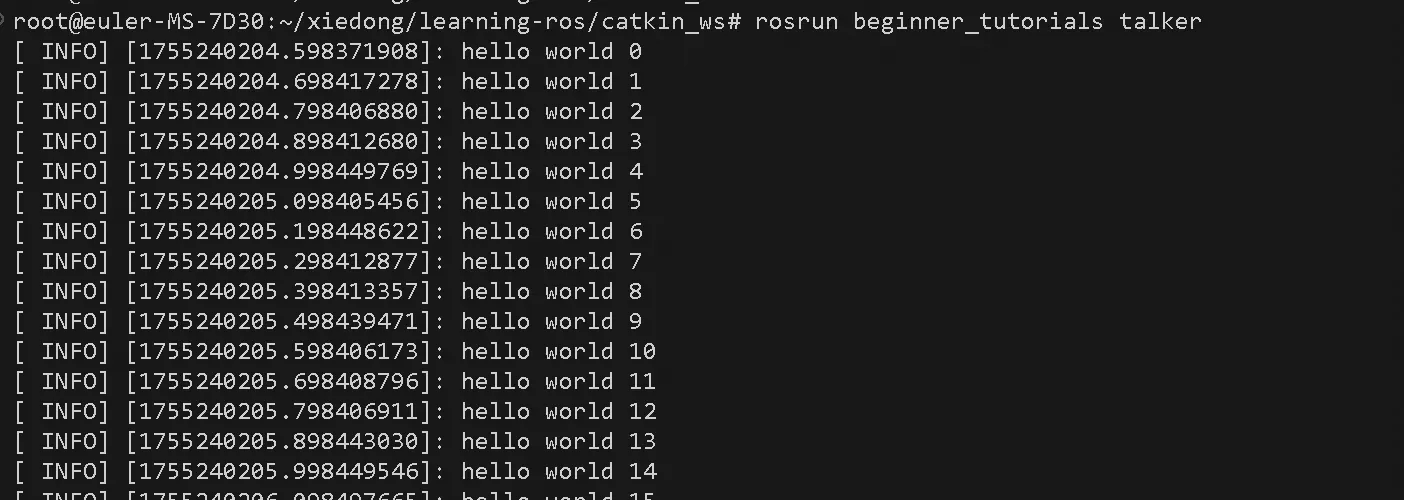
rosrun beginner_tutorials talker
- 作用:运行 beginner_tutorials 包里的 talker 可执行程序。
- 等价于:直接执行
~/xiedong/learning-ros/catkin_ws/devel/lib/beginner_tutorials/talker,但 rosrun 会自动帮你查找路径和设置环境变量。
rosrun beginner_tutorials listener
- 作用:运行 beginner_tutorials 包里的 listener 可执行程序。
- 等价于:直接执行
~/xiedong/learning-ros/catkin_ws/devel/lib/beginner_tutorials/listener。
下面就可以执行节点了:
bash展开代码. devel/setup.bash
nohup roscore &
rosrun beginner_tutorials talker
rosrun beginner_tutorials listener


本文作者:Dong
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 CC BY-NC。本作品采用《知识共享署名-非商业性使用 4.0 国际许可协议》进行许可。您可以在非商业用途下自由转载和修改,但必须注明出处并提供原作者链接。 许可协议。转载请注明出处!